NASA’s Space Technology Mission Directorate (STMD) announced today that the proposal by Prof. Kristin Yvonne Rozier entitled “Multi-Platform, Multi-Architecture Runtime Verification of Autonomous Space Systems” was selected for funding under the call for Verification and Validation of Autonomous Systems.
According to NASA: “The Early Career Faculty (ECF) component of the Space Technology Research Grants Program awards grants to accredited U.S. universities on behalf of outstanding faculty researchers early in their careers. ECF challenges early career faculty to examine the theoretical feasibility of ideas and approaches that are critical to making science, space travel, and exploration more effective, affordable, and sustainable. Awards result from successful proposals to the ECF Appendix to the SpaceTech-REDDI NASA Research Announcement. The ECF Appendix is expected to be released at least biannually and will feature specific topics. Awards are expected to be a maximum of three years in duration and the typical award amount is $200K/year.”
Abstract:
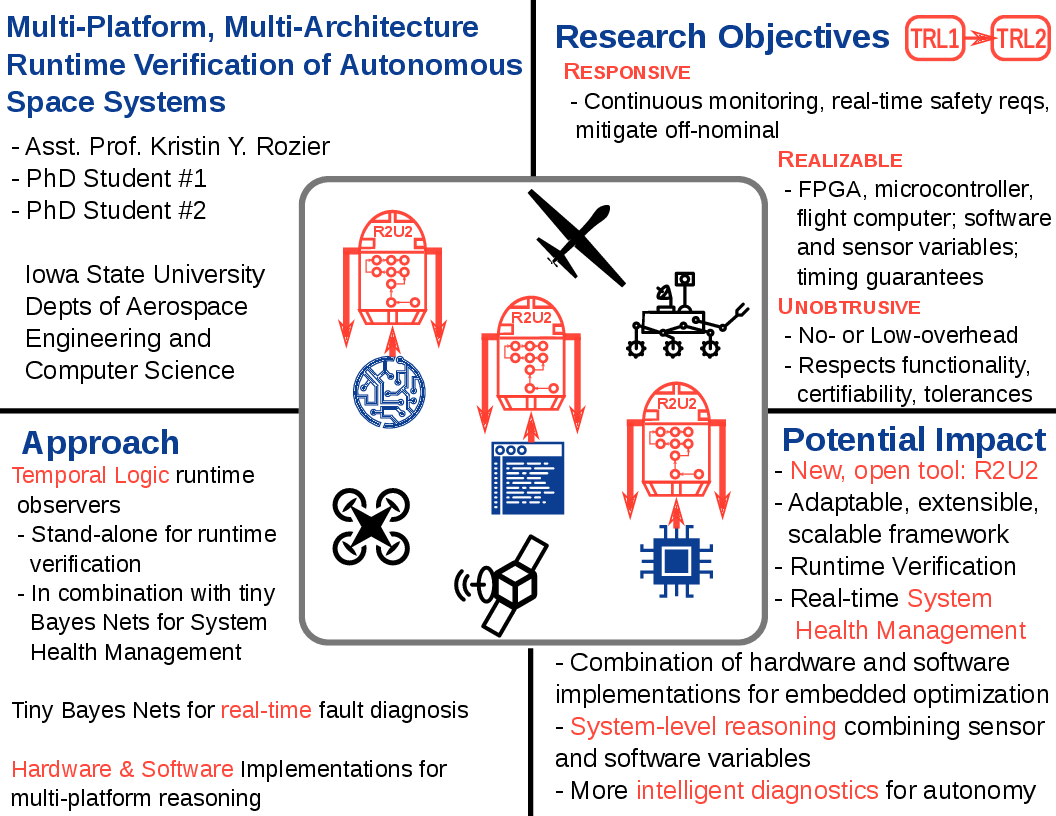
Autonomous systems are only capable of effective self-governing if they can reliably sense their own faults and respond to failures and uncertain environmental conditions. We propose to design a real-time, onboard runtime verification and system health management (SHM) framework called R2U2, to continuously monitor essential system components such as sensors, software, and hardware for detection and diagnosis of failures and violations of safety or performance rules during the mission of autonomous space systems, such as rovers, small satellites, or Unmanned Aerial Systems (UAS) flying in the skies of other planets. R2U2 is multi-platform and multi-architecture to address the requirements and capabilities of these embedded systems. R2U2 stands for Responsive, Realizable, Unobtrusive Unit; it is named after its three crucial properties that are currently absent from state-of-the-art SHM capabilities. Responsiveness means evaluating system health in real time, with provable timing and performance guarantees. Realizability involves being adaptable, extensible, and scalable to multiple platforms and architectures. Unobtrusiveness requires R2U2 to operate without altering crucial properties of the system: functionality, certifiability, timing, or tolerances for size, weight, power, telemetry bandwidth, software overhead. A full-scale version of R2U2, with options for hardware- and software-based implementations would have tremendous impact on the ability of autonomous space systems to perform real-time system-level reasoning about their health.
Congratulations to the seven fellow NASA ECF Award Winners: Necmiye Ozay (University Of Michigan), Seok Woo Lee (University of Connecticut), SungWoo Nam (University of Illinois at Urbana-Champaign), Sonia Chernova (Georgia Institute of Technology), Dimitra Panagou (University Of Michigan), Daniel Szafir (University Of Colorado, Boulder), and Stefanie Tellex (Brown University).